背景:某生成任务用到了DDPM,为了更直观理解其前向和反向过程,写个简易的Toy工程
扩散模型简介
由两条参数化马尔可夫链组成。 前向过程(又称扩散过程)时逐渐向数据中添加噪声,直到数据完全退化为噪声。反向过程则逐步去噪,最终达到数据生成的目的
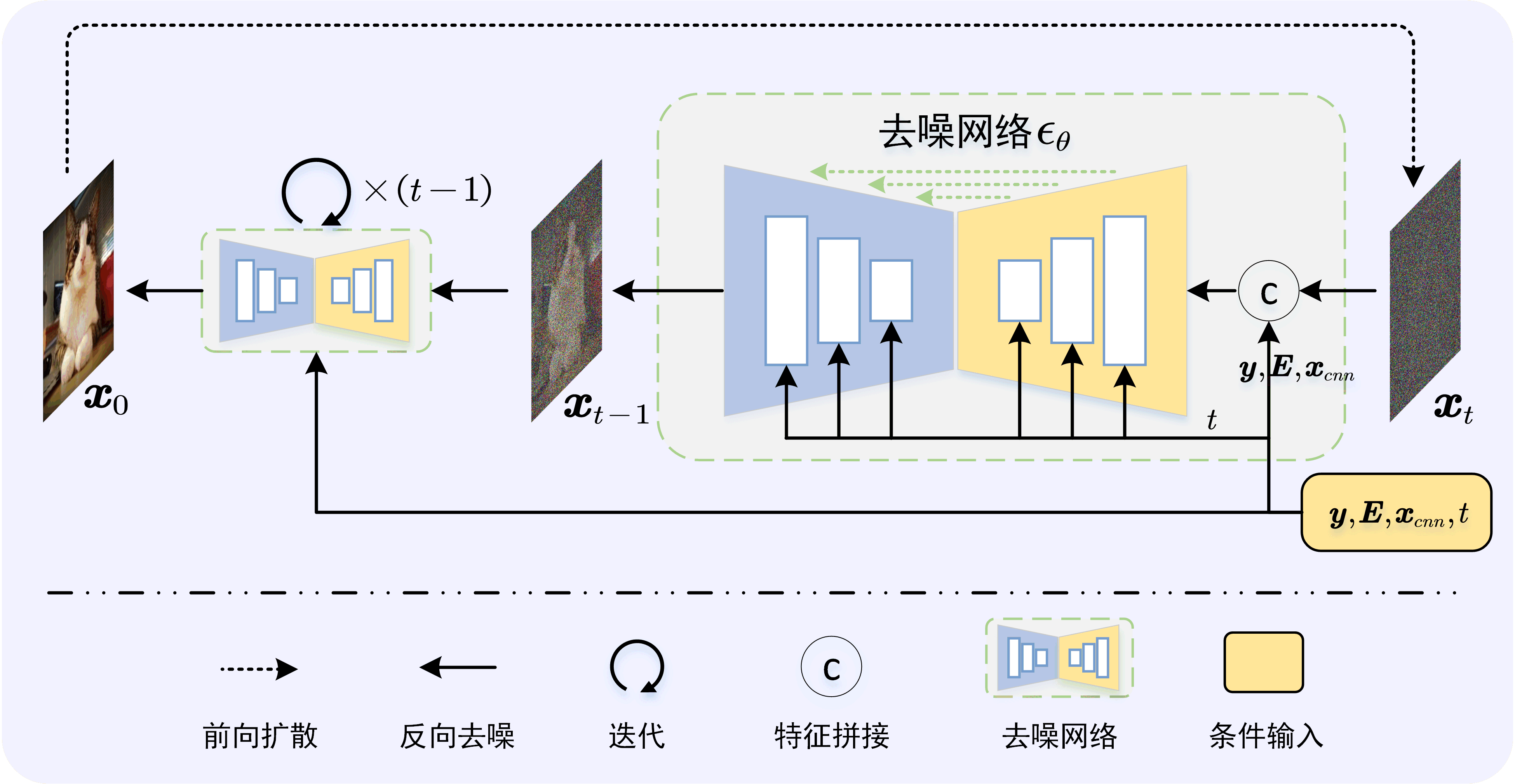
下两图是毕设中的,条件扩散模型

前向过程
前向为加噪过程,核心公式如下

其中$\bar{\alpha}_t=\textstyle \prod_1^t\alpha_t$
$\alpha_{1:T}\triangleq(\alpha_1,\alpha2,\dots,\alpha_T)$是一组超参数,用以控制每次迭代的噪声方差,并且满足条件$0 < \alpha_t < 1$以确保$t \rightarrow \infty$时方差有界
对应核心代码
sqrt_alphas_cumprod = torch.sqrt(alphas_cumprod)
sqrt_one_minus_alphas_cumprod = torch.sqrt(1 - alphas_cumprod ** 2)
# sample t and noise
t = torch.randint(0, n_steps, (b,)).to(device)
z = torch.randn(b, 1).to(device)
# forward sample xt
xt = sqrt_alphas_cumprod.gather(-1, t).view(-1, 1) * x + sqrt_one_minus_alphas_cumprod.gather(-1, t).view(-1, 1) * z
# denoise
z_pred = denoiser(xt, t)
loss = F.mse_loss(z, z_pred)反向过程
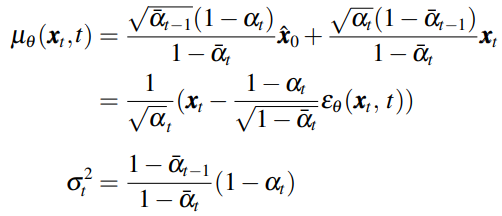
反向采样过程的核心公式如下
对应核心代码
alphas_cumprod_prev = torch.cat([torch.ones(1).to(device), alphas_cumprod[:-1]])
posterior_variance = (1. - alphas) * (1. - alphas_cumprod_prev) / (1. - alphas_cumprod)
def sample_ddpm(x, t):
t = torch.tensor([t]).to(device)
at = alphas.gather(-1, t).view(-1, 1)
st = sqrt_one_minus_alphas_cumprod.gather(-1, t).view(-1, 1)
mean = torch.sqrt(1.0 / at) * (x - (1.0 - at) * model(x, t.repeat(n_samples)) / st)
var = posterior_variance.gather(-1, t).view(-1, 1)
xt_pre = mean + torch.sqrt(var) * torch.randn(n_samples, 1)
return xt_pre注意:反向过程需要计算给定$\boldsymbol{x}_0$下的后验分布
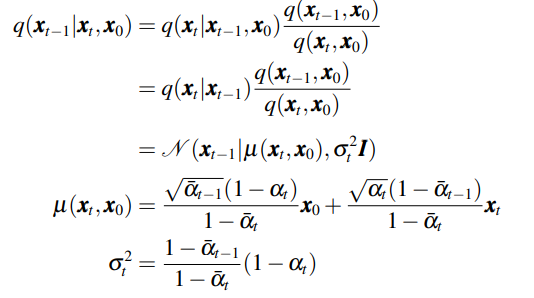
然而反向过程$\boldsymbol{x}_0$未知,DDPM采用的是网络去噪估计$\hat{\boldsymbol{x}}_0=\frac{1}{\sqrt{\bar{\alpha}_t}}(\boldsymbol{x}_t-\sqrt{1-\bar{\alpha}_t}\epsilon_\theta)$,带入上式即可得到反向核心公式
DDIM加速采样
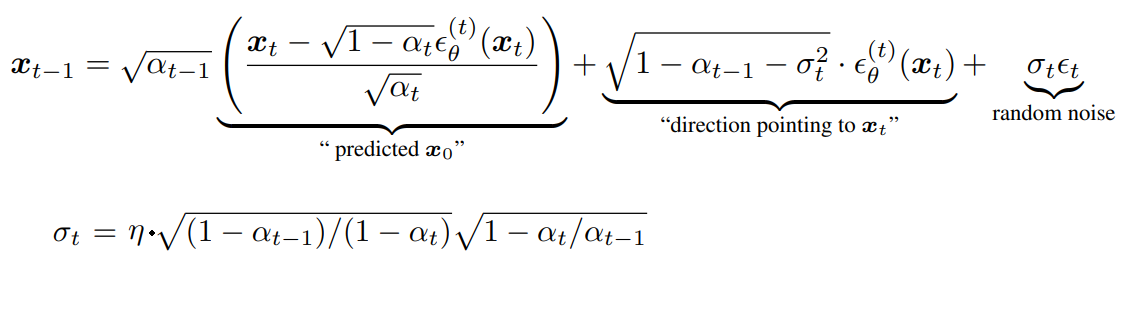
对应核心公式
def sample_ddim(x, t, eta = 1):
t = torch.tensor([t]).to(device)
at = alphas_cumprod.gather(-1, t).view(-1, 1)
at_1 = alphas_cumprod_prev.gather(-1, t).view(-1, 1)
sigma_t = eta * torch.sqrt((1 - at_1) / (1 - at) * (1 - at / at_1))
xt_pre = (
torch.sqrt(at_1 / at) * x
+ (torch.sqrt(1 - at_1 - sigma_t ** 2) - torch.sqrt(
(at_1 * (1 - at)) / at)) * model(x, t.repeat(n_samples))
+ sigma_t * torch.randn_like(x)
)
return xt_pre实验对比
以一维数据为例,扩散模型学习给定噪声分布,完成后分别基于DDPM和DDIM进行生成
data = torch.cat([
torch.randn(30000, 1).to(device) * 0.01 + 0.5,
torch.randn(40000, 1).to(device) * 0.03 + 0.1,
torch.randn(30000, 1).to(device) * 0.01 - 0.4,
])结果如下

可以看出,扩散模型基本可以学出目标数据分布。DDIM可能是由于模型太简单,加速不明显,一般可以10~20倍加速
问答环节
- DDPM为什么慢?
- 答:因为需要T比较大
- DDPM为什么需要T比较大,能不能缩短步数,或者跳步采样?
- 答:
- DDIM为什么能加速?
- 答: